Touch Object Requirement
The Neonode Touch Sensor Module detect and trace objects by detecting diffusely reflected infrared light.
Requirements on the object to detect include:
- A minimum reflectance of 30% in the near IR-spectrum is needed for proper signal levels, that is, the object can not be too dark.
- Object surface must be diffuse. A glossy or mirror-like object may not scatter enough light towards correct receivers in order to generate a reliable detection.
- An object must be ≥ 5 mm to ensure sufficient signal levels. This is closely related to reflectance. A white, diffuse object may be smaller than a dark, glossy one.
Touch Accuracy
Specification
Measured touch coordinate error in X and Y axis is less or equal than the specified value for about 95% of the cases.
Touch coordinate error data is calculated by subtracting the actual position and measured position in X and Y axis.
The touch accuracy of the Touch Sensor Module can be described statistically with the normal distribution and a standard deviation of 2 sigma. This means that the touch position reported by the sensor module will deviate less than the specified value in 95% of the cases.
For the definition of touch accuracy, refer to TSM - Definitions.
Response Time
The specification of response time reflects the reaction speed of a Touch Sensor Module.
Specification
- Initial touch: ~50 ms, at 33 Hz scanning frequency (default frequency in idle mode).
- Continuous tracking: 10 ms, at 100 Hz scanning frequency (default frequency in active mode).
Increasing the scanning frequency decreases the response time.
Initial Touch
The specified response time for the initial touch starts from the instant an object is presented in the sensor module's touch active area and stops when the module starts to send the first touch notification for this object. The specified response time consists of two numbers reflecting the best case and the worst case, with the average response time right in the middle.
The response time (t) can be calculated for different idle mode frequencies (f) can be calculated by the formulas below:
Best case: t = 16 ms
Worst case: t = 1/f + 16 ms
Average: t = (1/f + 32 ms) / 2
In touch applications, an object will be detected slightly before it reaches the touch surface, making the perceived response time shorter.
Continuous Tracking
After the first touch notification, the sensor module will continuously track and send touch notifications to update the object position. The response time is therefore defined as the time between subsequent touch notifications.
The response time (t) can be calculated for different active mode frequencies (f) can be calculated by the formula below:
t = 1/f
Scanning Frequency
The scanning frequency can be set using the Neonode API. The default value is 100 Hz in active mode, that is, when an object is detected or tracked. The default value in idle mode, that is, when no object is detected or tracked, is 33 Hz. The maximum scanning frequency for default Touch Active Area depends on the product variant (sensor module's length). See the following chart for maximum scanning frequency for default parameter values.
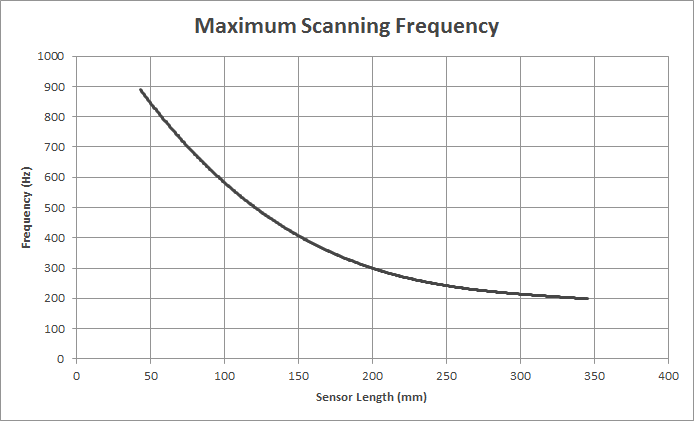
The maximum scanning frequency will decrease if the scanning range increases from default value.
The reported frequency (the speed which touches are reported to the host system) can be lower than the scanning frequency, due to protocol and the host configuration.
Please refer to our support team for further information.
For the definition of scanning frequency, refer to TSM - Definitions.